Токоприемник Т-5М1
Назначение и технические данные. Токоприемник Т-5М1 предназначен для передачи с помощью скользящего контакта электрической энергии от контактного провода к электрическому оборудованию электровоза. Технические данные токоприемника Т-5М1 следующие:
Номинальное напряжение, В .. 3000 Продолжительно допустимый ток, А:
при стоянке.................. 300
при движении................ 2200
Наибольшая скорость движения, км/ч ...................... 120
Время подъема токоприемника от сложенного положения до наибольшей рабочей высоты при номинальном давлении сжатого воздуха, с 7-10
Время опускания токоприемника от наибольшей рабочей высоты до сложенного положения при номинальном давлении сжатого воздуха, с 3,5-6,0 Диапазон рабочей высоты, мм 400-1900 Наибольшая высота подъема, мм 2100 Статическое нажатие на контактный провоД в диапазоне рабочей высоты, Н:
активное (при подъеме) 100 пассивное(при опускании) .... 130
Ход каретки, мм.............. 50
Разница между наибольшим и наименьшим нажатиями при одностороннем движении токоприемника в диапазоне рабочей высоты, Н, не более ....................... 15
Опускающая сила в диапазоне рабочей высоты, Н, не менее .... 200
Наименьшее давление сжатого воздуха для нормальной работы пневматического привода, кПа .. 350
Начальное давление сжатого воздуха для испытания пневматического привода на герметичность, к Па 675
Напряжение переменного тока частотой 50 Гц для испытания изоляции (на электровозе)в течение 1 мин, В........................ 12 000
Масса, кг.................... 269
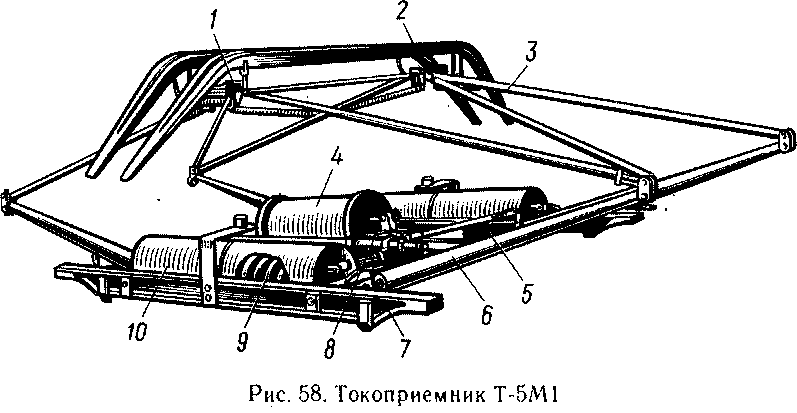
Конструкция. Токоприемник состоит из основания 7(рис. 58) нижних 6 и верхних 3 рам, полозов 2, кареток 1, подъемных пружин 9, пневматического привода 4 с опускающими пружинами, редукционного устройства 8.
Основание токоприемника сварено из швеллерной стали и угольников. На нем установлены цилиндр пневматического привода и редукционное устройство. Нижние рамы, выполненные из съемных конусных труб и вала, укреплены в основании. Верхние рамы, представляющие конструкцию из тонкостенных труб, шар-нирно соединены с нижними рамами и несут на себе клещеобразного вида каретки, на которых' укреплены два полоза.
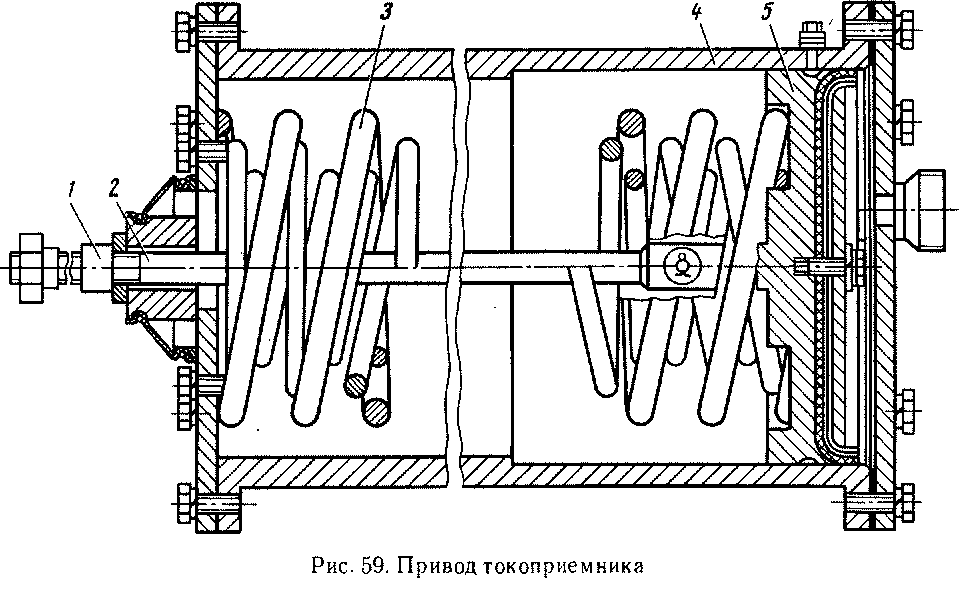
Токоприемник поднимается при подаче в цилиндр 4 (рис. 59) привода сжатого воздуха. Поршень5 сжимает опускающие пружины 3, расположенные в цилиндре, и подъемные пружины 9(см. рис. 58)срабатывают.
Шарнирно связанные с подъемными пружинами нижние рамы 6поворачиваются и обеспечивают подъем верхних рам 3 совместно с каретками 1 и полозами 2. Синхронизация поворота валов нижних рам обеспечивается тя-гами5, которые шарнирно укреплены в ушках валов нижних рам. Подъемные пружины защищены от попадания снега стеклопластиковыми кожухами 10.
В рабочем диапазоне высоты подъема полозов токоприемника опускающие пружины 3, находящиеся в цилиндре привода (см. рис. 59), полностью сжаты, и нажатие полоза на контактный провод определяется только усилием подъемных пружин 9 (см. рис. 58). При выпуске сжатого воздуха из цилиндра опускающие пружины, разжимаясь, компенсируют действие подъемных пружин и опускают токоприемник. При разборке токоприемника сначала ослабляют подъемные пружины во избежание опасности удара при самопроизвольном подъеме.
Каретки с полозами удерживаются-в горизонтальном положении четырьмя оттяжными пружинами, которые дают возможность некоторого поворота всего верхнего узла вокруг поперечной оситокоприемника. Каждый полоз может самостоятельно поворачиваться на 5-7° относительно его продольной оси.
Контактное нажатие регулируют изменением натяжения подъемных
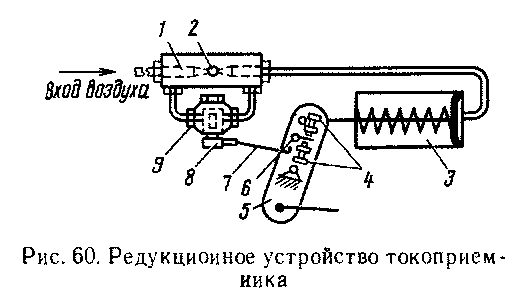
рекрыт, и воздух в цилиндр 3 попадает через регулируемое отверстие 2 воз духор а с п р е де л ите л я; токоп р ие м -ник поднимается медленно. Рычаг при движении перемещает ручку крана, который открывается после прикосновения полозов к контактному проводу. При опускании токоприемника воздух из цилиндра выходит через кран. Происходит быстрое опускание токоприемника, однако, пройдя наименьшую рабочую высоту, кран перекрывается, воздух выходит через регулируемое отверстие, и токоприемник плавно опускается на амортизаторы.
Время подъема и опускания токоприемника определяют по секундомеру. При подъеме время следует отсчитывать с момента начала движения токоприемника от сложенного состояния до подъема его на наибольшую рабочую высоту при номинальном давлении сжатого воздуха, а при опускании - с момента начала движения полоза с наибольшей рабочей высоты до сложенного положения.
Высоту, нажатие и время подъема иопусканиятокоприемника проверяют при пуске электровоза в эксплуатацию и при каждом техническом обслуживании ТО-3 и текущих ремонтах.
пружин, вращая их на держателях; высоту наибольшего подъема - специальной гайкой 1 на пневматическом приводе (см. рис. 59), ограничивающей ход штока 2 поршня.
Время подъема и опускания токоприемника регулируют редукционным устройством (рис. 60), которое состоит из крана 9 и воздухораспределителя 1. Ручка Экрана тягой/связана с рычагом 5 штока пневматического цилиндраД Изменяя болтами 4 длину тяги и угол поворота валиков 6 тяги 7, регулируют опускание токоприемника. Удлиняя тягу, ускоряют, а укорачивая тягу, замедляют опускание токоприемника. Подъем токоприемника регулируют специальным винтом воздухораспределителя.
При опущенном токоприемнике кран 9 редукционного устройства пе-
 | Электродвигатель П-11М | | Быстродействующий выключатель БВП-5-02 |
| Электродвигатель П-11М | | Быстродействующий выключатель БВП-5-02 |